About Me
Senior Machine Learning Research Scientist at Toyota Research Institute (TRI), specializing in transformer pretraining. My work focuses on model architecture, data scaling, and evaluation methodology. Over 8 years, I’ve applied these ideas to self-driving, language models (LLM), multimodal models (VLM), and robotics (VLA), with an emphasis on rigorous data-driven experimentation. I value working in strong collaborative environments and impactful results.
- Artificial Intelligence
- Natural Language Processing
- Multi-modal Language Models
PhD Machine Learning
Paris Saclay University, L2S and Renault
MEng in Scientific Computing
ENSEIRB-MatMéca, Bordeaux, France
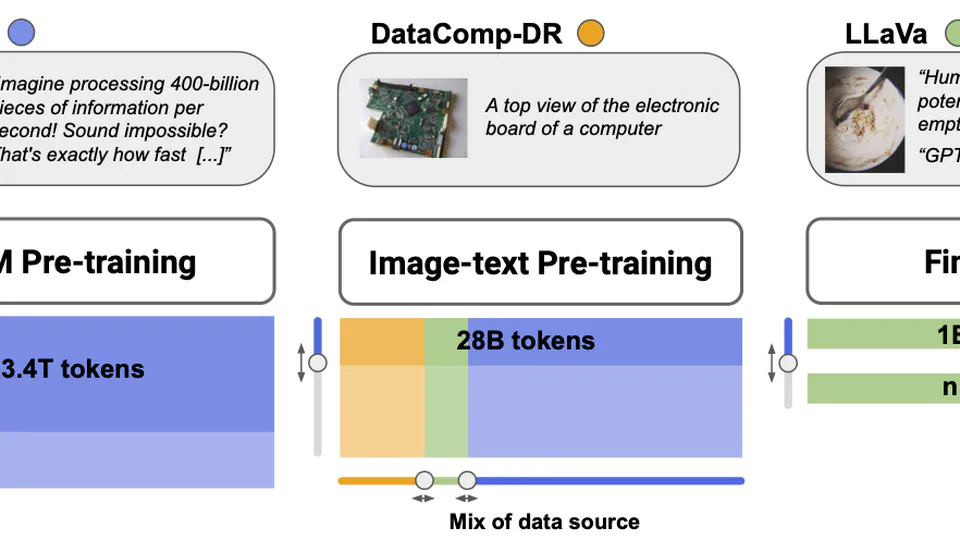
I’m a senior research scientist at Toyota Research Institute. I pre-train, uptrain, fine-tune, experiment, and do research with Large Language Models, Vision Language Models, and Large Behavior Models.
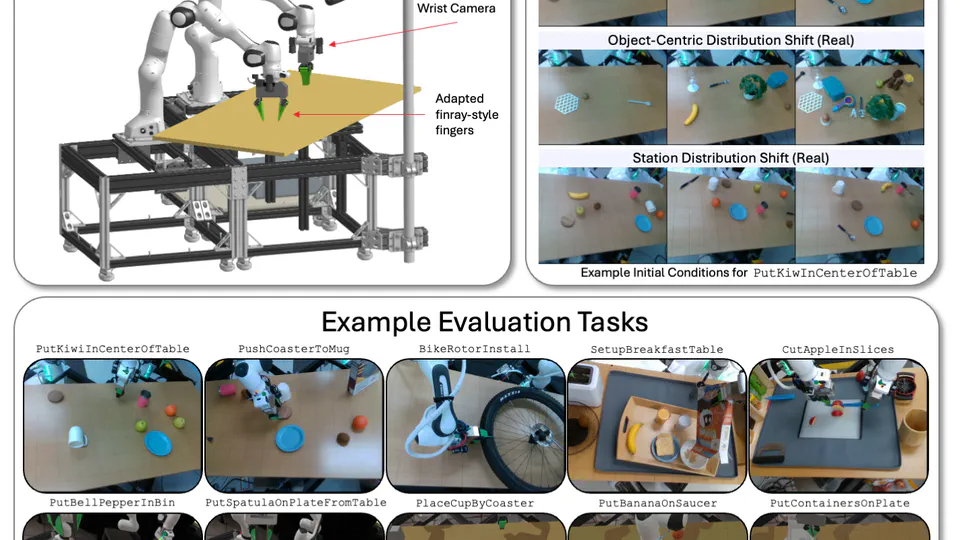
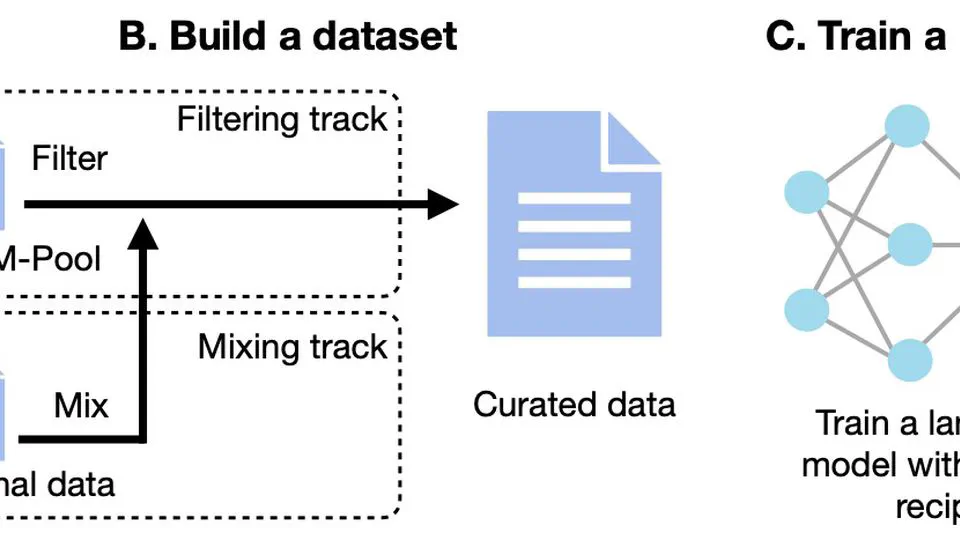
I attempt to understand and improve large models, their evaluation process, and their training data. I apply large models to robotic manipulation, and agents to push the boundary of open-ended embodied intelligence.